

















機器人是一門綜合科學技術,一個小型機器人,是自動控制、測量、計算機技術、人工智能技術、機械、材料和通信技術的綜合結晶。那么在工業機器人中,涉及到哪些高科技?這些高科技目前進展如何?

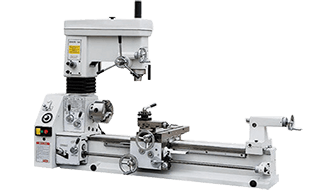
圖為一臺桁架機械手搭配兩臺數控車床,組成自動化加工單元
1.[數控機床配套的機器人機械手的結構]
通過應用有限元分析、模態分析、仿真設計等現代設計方法,實現機器人操作機構的優化設計。探索新的高強度輕質材料,進一步提高載荷/自重比。如以德國庫卡公司為代表的機器人公司,將機器人的平行平行四邊形結構改為開鏈結構,擴大了機器人的工作范圍,輕質鋁合金材料的應用大大提高了機器人的性能。此外,采用先進的RV減速器和交流伺服電機,使機器人機械手幾乎成為免維護系統。該機制正朝著模塊化和重組的方向發展。比如關節模塊中的伺服電機、減速器、檢測系統三位一體;整個機器人由關節模塊和連桿模塊重組構成;模塊化裝配機器人產品在國外有市場。機器人的結構更加靈巧,控制系統越來越小,兩者都在向集成化發展。利用并聯機構和機器人技術實現高精度測量和加工,是機器人技術向數控技術的拓展,為未來機器人與數控技術的融合奠定了基礎。
2.[機器人控制系統]
開放式模塊化控制系統。向基于PC的開放式控制器發展,便于標準化和網絡化;設備集成度提高,控制柜越來越小,采用模塊化結構;大大提高了系統的可靠性、可操作性和可維護性。控制系統性能進一步提高,從過去控制標準的6軸機器人發展到現在可以控制21軸甚至27軸,實現了軟件伺服和全數字控制。人機界面更加友好,語言和圖形編程接口正在開發中。機器人控制器的標準化和網絡化,以及基于PC的網絡化控制器成為研究熱點。除了進一步提高在線編程的可操作性,離線編程的實用性將成為研究的重點,一些領域的離線編程已經實現。
3.[機器人傳感技術]
根據智能制造的知識,機器人中的傳感器發揮著越來越重要的作用。裝配焊接機器人除了位置、速度、加速度等傳統傳感器外,還采用了激光傳感器、視覺傳感器和力傳感器,實現了焊縫的自動跟蹤、自動化生產線上物體的自動定位和精密裝配作業,大大提高了機器人的作業性能和對環境的適應能力。遙控機器人采用視覺、聲音、力和觸覺等多傳感器融合技術,對環境進行建模并進行決策控制。為了進一步提高機器人的智能和適應性,各種傳感器的使用是其解決問題的關鍵。研究的重點在于有效可行的多傳感器融合算法,尤其是在非線性、非平穩、非正態分布的情況下。另一個問題是傳感系統的實用性。
4.[網絡通信功能]
日本安川和德國庫卡最新的機器人控制器,都接入了Canbus、Profibus和一些網絡,使機器人從過去的獨立應用向網絡應用邁出了一大步,也使機器人從過去的專用設備向標準化設備發展。
5.【機器人性價比】
機器人的性能在不斷提高(高速度、高精度、高可靠性、易操作維護),而單機的價格在不斷降低。隨著微電子技術的飛速發展和大規模集成電路的應用,機器人系統的可靠性大大提高。以前機器人系統的可靠性MTBF通常是幾千小時,現在已經達到了5萬小時,可以滿足任何場合的需要。
6.[多代理控制技術]
這是機器人研究的一個新領域。主要研究了多智能體群體體系結構、通信和協商機制、感知和學習方法、建模和規劃以及群體行為控制。
更多資訊
2024-07-03
2024-04-13
2024-01-31
2023-11-03
2023-10-26
2023-09-27







 15653996966
15653996966